안녕하세요.
이번 글에서는 처음으로 딥러닝을 적용한 segmentation 모델인 FCN에 대해서 소개해드리려고 합니다.
Conference: CVPR 2015
(논문은 2014년에 나옴)
Paper title: Fully Convolutional Networks for Semantic Segmentation
Authors: UC Berkely
https://arxiv.org/abs/1411.4038
Fully Convolutional Networks for Semantic Segmentation
Convolutional networks are powerful visual models that yield hierarchies of features. We show that convolutional networks by themselves, trained end-to-end, pixels-to-pixels, exceed the state-of-the-art in semantic segmentation. Our key insight is to build
arxiv.org
FCN 모델은 최초의 딥러닝 기반 segmentation 모델입니다.
물론 FCN 이전에 딥러닝을 사용한 segmentation 모델이 있긴 했지만, 현재 대부분의 segmentation 모델들이 FCN을 베이스로 사용하고 있기 때문에 FCN을 최초의 딥러닝 기반 segmentation 모델로 간주하고 있습니다.
FCN 논문이 중요한 이유는 두 가지로 요약할 수 있습니다.
- 앞으로 딥러닝 기반의 segmentation 논문들을 읽으실 때, FCN 논문에서 언급되는 다양한 용어들이 자주 등장하기 때문입니다.
- 대부분의 딥러닝 기반 segmentation 모델들이 FCN 구조를 기반으로 하고 있기 때문입니다.
그럼 지금부터 FCN 모델을 리뷰해보도록 하겠습니다.
(중간중간에 설명이 더 필요한 부분은 "CS231n Lecture 11. Detection and Segmentation"강의를 참고했습니다)

0. Abstract
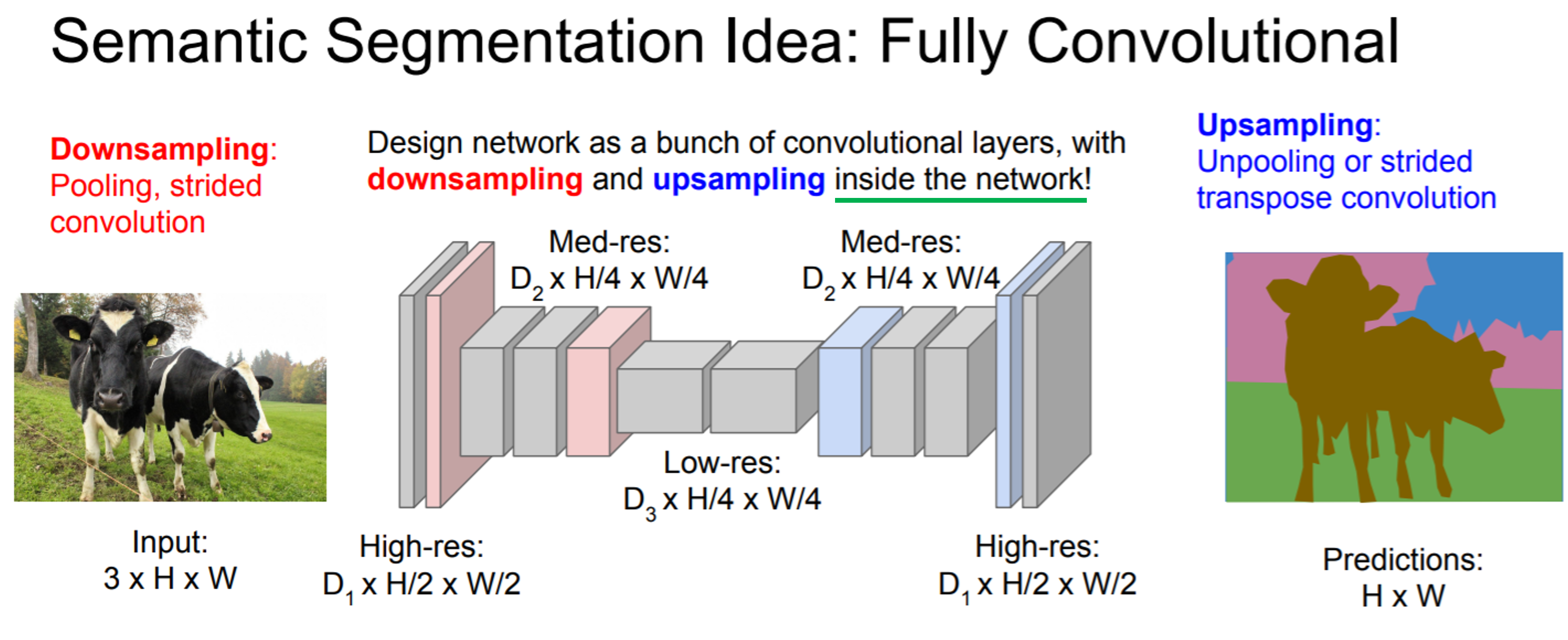
- Convolutional (neural) network는 아래 그림과 같이 단계별로(=stage) hierarchical feature를 뽑아 내는 강력한 visual model 입니다.

- 이 논문에서는 convolutional network를 이용하여 "end-to-end", "pixel-to-pixel" 학습을 기반으로 semantic segmantation을 학습한다고 언급했습니다.
- end-to-end로 학습을 시킨다는 말을 이해하기 위해서는 "end-to-end"가 아닌 모델을 이해해야 합니다. 우선 "그림2", "그림3"을 통해 설명하도록 하겠습니다.
- 그림2
- 첫 번째로 end-to-end가 아닌 모델은 전통적인 pattern recognition 모델입니다.
- 딥러닝에서는 이미지의 특징을 추출해주는 filter(=conv filter)들이 학습 가능 (learnable) 하지만, 전통적인 pattern recognition 모델은 사람이 미리 (fixed) filter를 설계하는 방식으로 디자인 됩니다.
- 예를 들어, 자동차를 잘 분류할 수 있을 것 같은 filter를 설계하여 feature를 뽑은 뒤, 자동차 객체를 잘 분류할 수 있도록 분류기 부분을 학습시키는 것이지요.
- 이렇게 하면 classifier만 학습이 되는데, 만약 분류하려는 객체가 바뀌면 filter를 또 수동적으로 바꿔줘야 합니다.
- 이러한 전통적인 pattern recognition 모델은 "hand-crafted feature extractor(=filter)"와 "trainable classifier" 두 부분으로 구성되어 있다고 할 수 있는데, 실제로 학습을 하는건 classifier 부분 뿐입니다.
- 다시말해, 입력이 들어오면 "hand-crafted feature extractor 부터 classifier까지" = "처음부터 끝까지" ="end-to-end "로 학습하는 것이 아니기 때문에, end-to-end 모델이 아닙니다.
- 그림3
- 두 번째로 "end-to-end"가 아닌 모델은 cascade 방식의 모델입니다.
- Cascade는 폭포라는 사전적 의미가 있지만 순차적 단계적인 늬앙스를 내포하고 있습니다.
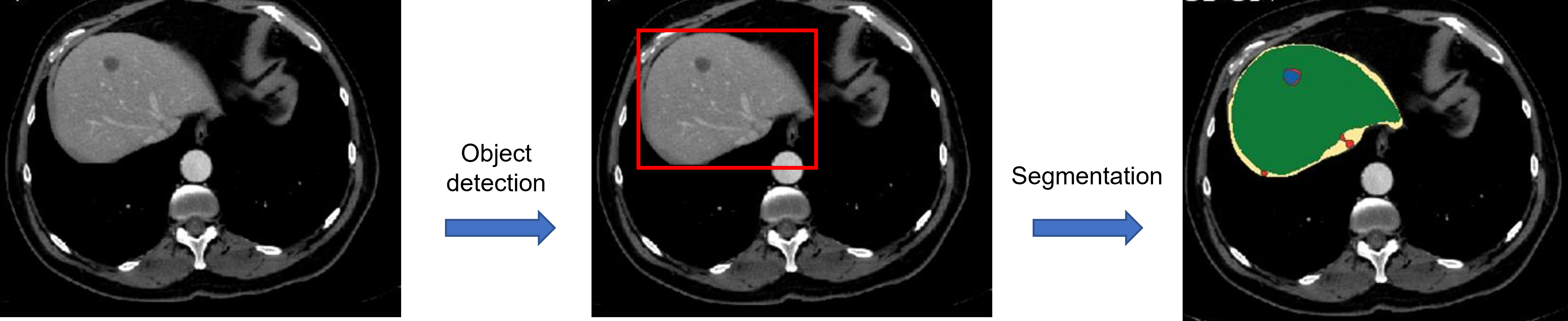
- 예시1 (그림3-1)
- 먼저, Segmentation 작업을 cascade 방식으로 진행할 수 있습니다.
- Segmentation 작업을 진행할 때, 우선 관심 영역을 detection 하고 (RoI detection), 해당 RoI 영역을 segmentation 하도록 설계할 수 있습니다.
- 즉, object detection 모델과, segmenation 모델을 각각 독립적으로 사용하는 것이죠.
- 반면에, Mask RCNN은 하나의 모델에 같이 개별 task를 수행하는 loss들을 결합시킨 multi-task learning 방식(=classification loss+bouding box loss+mask loss)을 사용합니다. 즉, RoI detection과 segmentation이 동시에 end-to-end로 학습이 되는 방식이라 할 수 있겠습니다.
- 예시2 (그림3-2)
- 어떤 이미지의 key point (or landmark)를 찾아야 한다고 가정해보겠습니다.
- 이때, 처음부터 큰 이미지에서 key point를 찾는 것은 굉장히 어려운 문제입니다.
- 그러므로 먼저 object detection 모델을 이용해 key point가 있을 만한 RoI를 선별(=RoI detection)하고, 선별된 RoI를 CNN 모델에 입력해 해당 key point를 찾아주도록 합니다(=이때 CNN모델의 loss function은 해당 key point의 x,y 좌표값을 학습하는 regression loss를 이용합니다).
- 이 경우 object detection 모델과 CNN 모델은 독립적으로 이용됩니다.


- FCN segmentation 모델은 아래와 같은 이유로 "end-to-end" 방식을 취하고 있다 할 수 있습니다.
- Segmentation을 위해 사용되는 filter들이 learnable 합니다.
- 독립적인 딥러닝 모델들을 이용하지 않고(=not cascade), 하나의 딥러닝 모델에서 segmentation 작업을 진행 합니다.
- FCN 모델은 segmentation을 위해 사용되는 filter들이 전부 conv filter (=Fully Convolution Network)로 구성되어 있기 때문에, 구조적으로 봤을 땐 input image size 크기를 고정될 필요가 없습니다 (=arbitrary). → FC layer가 제거 되었기 때문에 입력 이미지 크기가 고정될 필요는 없겠죠.
- Correspondingly-sized output는 "3.Fully convolutional networks"를 봐야 자세히 이해가 가능한데, 간단히 설명하면 segmentation 결과가 input size와 같은 spatial dimensions을 지닌다고 할 수 있겠네요.
- "3.Fully convolutional networks" ← "An FCN naturally operates on an input of any size, and produces an output of corresponding (possibly resampled) spatial dimensions."

- Pixels-to-Pixels를 짧게 설명하면 이미지의 pixel마다 classification 학습을 진행한다는 뜻으로 이해하면 될 것 같습니다. 그렇기 때문에 이 논문에서는 최종 segmentation 결과가 모든 pixel을 classification 하는 방식인 dense prediction task라고 설명하고 있습니다.
(↓↓↓ Dense Prediction Task 설명 ↓↓↓)
https://89douner.tistory.com/113?category=878997
1. Segmentation이 뭔가요?
안녕하세요~ 이번 Chapter에서는 segmentation에 대해서 알아보도록 할거에요. Segmentation을 하는 방식에는 여러가지가 있지만, 이번 chapter에서는 딥러닝을 기반으로한 segmentation에 대해서 알아보도록
89douner.tistory.com

- 먼저 위의 문장에서 나오는 semantic information, coarse layer, appearance information, fine layer와 같은 용어들만 정리하도록 하겠습니다.
- Appearance information
- Appearance는 말 그대로 "외관"이라는 뜻입니다 (appearance: the way a person or thing looks to other people).
- 사람들의 외관을 파악할 때 보통 전체적인 shape(or 윤곽선)들을 보고 판단하게 됩니다.
- CNN의 첫 번째 layer에 있는 filter들은 보통 edge feature들을 추출하기 때문에 "그림 4"에서 볼 수 있듯이 사람의 윤곽과 관련된 feature들이 잘 추출되는 것을 확인 할 수 있습니다.
- 이러한 세밀한 feature들(=edge)을 잘 추출한다고 하여 CNN의 초기 layer들을 fine layer라고도 합니다.
- 반대로 마지막 layer에서 추출된 feature들만 보면 이 물체의 외관(appearance)이 어떤지 알기 힘들다는걸 확인할 수 있습니다.
- Semantic information
- Semantic은 "의미론적"이라는 뜻을 지니고 있습니다.
- "그림 4"에서 볼 수 있듯이, 보통 CNN에서 제일 deep한 위치에 있는 layer들이 뽑는 feature들을 보면 객체의 외관을 파악하기 힘든 반면, feature들이 활성화된 부분들을 보면 옷과 같이 하나의 의미를 갖는 정보들을 보여준다는걸 알 수 있습니다.
- Coarse는 (fine과 반의어로 사용될 때) 굵다라는 뜻을 갖고 있습니다.
- 앞서 언급한 fine(=미세한; edge) feature들을 뽑은 초기 layer들과 비교해서 생각하면 여기서 언급하는 coarse의 의미가 어떻게 쓰인건지 파악하실 수 있을거라 생각됩니다. (Coarse: rough and not smooth or soft, or not in very small pieces)
- Appearance information

(↓↓↓CNN구조에서 layer의 깊이에 따라 conv filter가 뽑는 feature들이 다르다는걸 설명한 내용↓↓↓)
'Deep Learning for Computer Vision/Convolution Neural Network (CNN)' 카테고리의 글 목록 (2 Page)
#Interest: World History (The past) #Work: Deep Learning (The future) #Hobby: Music, Sports
89douner.tistory.com
(↓↓↓CNN layer의 깊이에 따라 나타나는 activation map을 직관적으로 설명한 내용 ↓↓↓)
https://89douner.tistory.com/260?category=993921
1. Activation Map
안녕하세요. 이번 글에서는 Class Activation Map (CAM)을 알아보기 전에 Activation Map을 통해 알 수 있는 것들이 무엇인지 알아보도록 하겠습니다. 1. CNN의 기본적인 연산 과정 Activation Map에 대해 설명하..
89douner.tistory.com
- FCN은 semantic information과 appearnace information을 combining(결합)하여 사용 한다고 하는데, 이 부분은 "4.2 Combining what and where"에서 더 자세히 설명하도록 하겠습니다.
1. Introduction
- CNN의 등장으로 인해 classification task, local task(ex: object detection, key-point detection (or landmark detection), local correspondence와 같은 분야에서 엄청난 발전을 이룰 수 있었습니다.
- Local correspondence는 따로 task라기 보다는 , CNN은 conv filter는 구조상 주변 pixel들을 고려하여 최종 값을 도출하기 때문에 local corresponence를 상대적으로 잘 고려해준다고 하여 local correspondence에 advance가 있었다고 표현한 것 같습니다. (CNN이전 모델들(ex: ML모델, SIFT, DNN(Deep Neural Network) 구조)에서는 pixel간의 local 정보를 무시하면서 학습하는 경향이 있었습니다)

- 이 논문이 나올 당시에는 아직 CNN 베이스의 segmentation 모델이 없었기 때문에, 앞서 object detection, classification과 같이 전체 이미지(=coarse)를 기반으로 task를 수행하는 것이 아닌, 이미지의 pixel(=fine)들 마다 classification 해주는 dense prediction을 수행할 수 있도록 연구가 되어야 한다고 주장하고 있습니다.
- 이러한 task를 위해서는 pixel마다 labeling을 해줘야 한다는 것을 보니, supervised learning 기반으로 학습할 것이라고 추론할 수 있습니다.

- 앞서 언급한대로 FCN은 end-to-end 방식으로 학습을 진행하며, pixel 별로 classification 작업을 수행하기 때문에 pixel-to-pixel (=dense prediction) 기반의 semantic segmentation을 수행한다고 할 수 있습니다. (참고로 semantic segmentation과 대비되는 개념으로는 instance segmentation이 있는데, instance segmentation은 다음 글인 UNet에서 더 자세히 설명하도록 하겠습니다)
(↓↓↓ semantic segmentation VS instance segmentation↓↓↓ )
- 또한 supervised pre-training을 이용하는 것으로 언급이 되어 있는데 pre-training을 어떻게 이용할 것인지는 뒷 부분을 봐야 더 명확히 이해할 수 있을 듯 합니다.
- FCN은 모두 convolutional layer로 구성되어 있기 때문에 입력 이미지 사이즈에 제약을 받지 않으며 (=arbitrary-sized inputs), dense prediction하기 위해 dense outputs을 출력한다고 설명하고 있습니다.
- 그외 dense feedforward computation, backpropagation, upsampling, pixel-wise prediction, learning with subsampling pooling라는 개념들은 뒤에서 FCN architecture를 상세히 설명하는 부분을 보고 어떻게 연계되는지 파악하는 것이 좋을 것 같습니다.

- asymptotically (점진적으로), absolutely 효과적이라고 표현하고 있는데 뒷 부분에도 따로 부가 설명을 하고 있지 않아 정확한 의미를 파악하진 못했습니다. (그냥 개인적으로 유추했을 때 이전 CNN 기반이 아닌 segmentation 모델이 CNN처럼 hierarchical 하지 않거나, 성능적으로 좋지 않기 때문에 "asymptotically, absolutely"라는 표현을 사용한게 아닌가 싶습니다. 혹시 아시는 분이 있으면 댓글 달아주세요!)
- 사실 FCN이 나오기 전에도 딥러닝 방식이 사용되긴 했으나 이것을 최초의 딥러닝 기반 segmentation 모델로 보고 있진 않습지만, FCN 모델의 우수성을 설명하기 위해 대비되는 개념으로 자주 등장하기 때문에 정확히 이해하고 있을 필요가 있습니다.
- 그럼 지금부터 FCN 이전에 나왔던 두 가지 방식 segmentation 학습 방법론을 설명하면서 이 논문에서 제기하고 있는 FCN 이전 모델들의 단점을 좀 더 자세히 설명해보도록 하겠습니다.
- FCN이전에 고안된 첫 번째 segmentation 학습 방법론은 patchwise(≠pixelwise) 학습 방식입니다.
- Patchwise learning 방식은 아래와 같습니다.
- 특정 크기의 patch를 설정해주고 CNN에 입력해 줍니다.
- 입력으로 들어간 patch는 CNN에 의해 classification이 됩니다.
- 이때 특정 class로 분류가 되었다면, 해당 patch 중앙에 위치한 pixel을 해당 class로 분류해줍니다.
- 이러한 과정을 슬라이딩 윈도우 (sliding window) 방식으로 반복하게 됩니다.


- 이러한 Patchwise learning 방식에는 여러 문제들이 있었습니다.
- 문제점1: 모든 Patch들을 CNN에 넣고 일일이 분류하는 작업을 수행하면 너무 많은 계산량을 요구하게 됩니다.
- 문제점2: Patch 크기를 키우면 하나의 patch에 두 개의 class가 동시에 들어가 있을 확률이 크기 때문에 어떻게 classification 해줄지 애매한 경우가 생깁니다. 또한, patch 끼리 겹치는 부분이 커지므로 중복계산이 진행되는 경우가 많아지겠죠.
- 문제점3: 그렇다고, 다시 patch 크기를 줄여주면 low resolution을 갖게 되는 문제가 발생합니다. (CNN에 input image로 들어가는 patch가 low resolution이라면 classification accuracy가 떨어질 가능성이 크겠죠? → 보통 CNN의 입력 크기가 클 수록 classification accuracy, object detection accuracy가 높아집니다)

- FCN이전에 고안된 두 번째 학습방법론은 pixelwise 방식입니다. FCN이전 pixelwise 방식은 아래와 순서로 진행됩니다.
- 전체 이미지를 CNN에 넣어줍니다.
- Pooling 과정 없이 feature를 추출해줍니다.
- 최종결과로 나온 "C×H×W" 형태(=아래 그림에서 "Scores:C×H×W"부분)의 tensor에서 C는 우리가 classification하고 싶은 class의 총 개수를 의미합니다. 다시말해, 최종 결과로 나온 "C×H×W" 형태의 tensor는 classification scroes (map)이라고 할 수 있습니다.
- 각 픽셀 위치(\(x_{ij}\))에 해당하는 score map (=C×1×1)에서 제일 높은 i번째 class score를 지닌 \(c_i\)에 맞는 색을 할당시켜줍니다.
- 이미지 상의 모든 pixel에 대해 할당작업이 끝나면 최종적으로 prediction 결과 (prediction map=H×W)가 나옵니다.
- Supervised learning 방식으로 학습이 진행되기 때문에 ground truth로 설정된 H×W의 true pixel들 정보가 존재합니다. Prediction (H×W)와 True label (H×W)에 대한 정보를 이용해 각각의 위치에 mapping되는 pixel들끼리 (classification) loss function을 적용시켜 줍니다. 이때, 각각의 위치에 해당되는 prediction과 true label pixel들간 계산되는 loss function은 cross entropy로 진행됩니다. 이러한 loss function 방식을 pixelwise loss function이라고 합니다.
- 아래 "그림8"에서는 각각의 pixel들의 loss를 총합하여 최종 loss값을 출력해주고 있는데, 각각의 pixel에서 계산된 loss의 총합(sum)으로 최종 loss를 출력할 수도 있고, 평균값(=sum/total number of pixels)으로 최종 loss값을 출력할 수 있습니다.
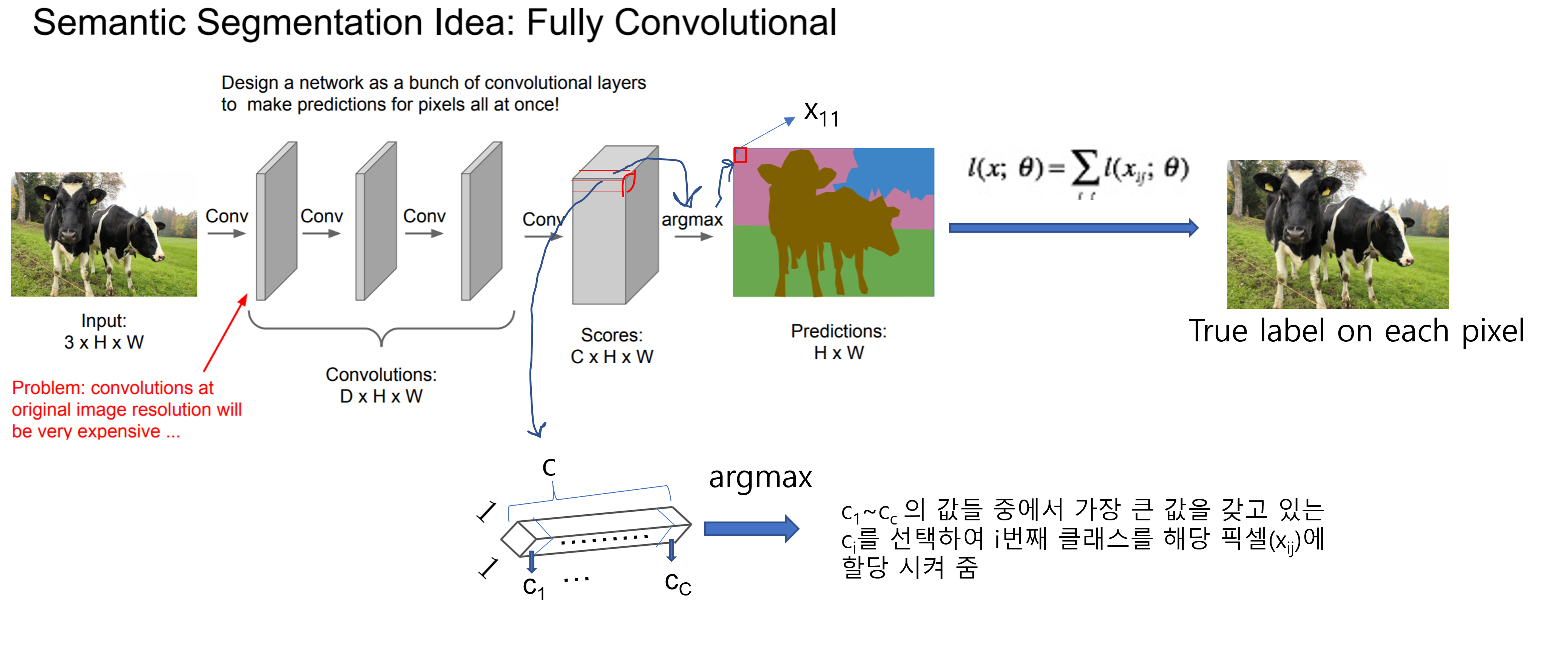
- 위에서 설명한 내용을 CS231n에서는 아래와 같이 표현합니다.
- You could see this tensor (C,H,W) as just giving our classification scores for every pixel in the input image at every location in the input image.
- You can imagine training this thing by putting a classification loss at every pixel of this output, taking an average over those pixels in space, and just training this kind of network through normal, regular back-propagation.
- Q.What is loss function?
- Since we’re making a classification decision per pixel, then we put a cross-entropy loss on every pixel of the output.
- So we have the ground truth category label for every pixel in the output, then we compute across entropy loss between every pixel in the output. And the ground truth pixels and then take either a sum or an average over space and then sum or average over the mini-batch.
- 앞서 언급한 FCN 이전의 pixelwise segmentation 방식은 방대한 계산량과 구조적인 feature를 뽑지 못한다는 문제점을 갖고 있습니다.
- 일반적인 CNN구조와 비교하면 쉽게 알 수 있습니다.
- 일반적인 CNN 구조(아래그림=VGG)는 layer가 깊어질 수록 더 많은 channel depth를 갖게 됩니다.
- 그렇기 때문에, 증가하는 channel depth에 맞게 feature map size도 (pooling 연산을 통해) 줄여줌으로써 일정한 계산량을 유지시켜 줍니다.
- 하지만, 앞선 방식에서는 pooling 연산을 적용시키지 않기 때문에 layer가 깊어질 수록 계산량이 굉장히 많아진다는 문제와 hierarchical feature(←글 앞 부분에서 설명함)를 뽑지 못하는 문제점을 갖고 있습니다.
- 결과부터 이야기하자면 위와 같은 문제로인해 FCN이 고안됩니다. 즉, FCN의 encoder 부분을 기존 CNN 방식처럼 수행하고, decoder(=upsampling) 부분을 붙여 segmentation 작업을 수행해줍니다. 자세한 설명은 FCN 모델 구조를 다루는 파트("3.Fully convolutional network"~"4.Segmentation Architecture")에서 하도록 하겠습니다.


- 위에서 언급한 문제들 외에 FCN 이전 segmentation 모델을 사용할 때 또 다른 문제는 superpixels, proposals, post-hoc refinement와 같은 전,후처리를 수행해야 했어서 번거로움이 있었다고 합니다.
- 여기에서 "fine-tuning from their learned representations"라는 표현이 있는 것으로 보아, classification에서 사용됐던 CNN conv filter들이 pre-trained model로써 FCN에 적용된 것을 확인할 수 있습니다. (더 정확한건 뒷 부분에서 설명해야 하지만, 결과적으로 먼저 말씀드리면 "FCN=Encoder+Decoder" 구조에서 encoder 부분이 ImageNet으로 학습한 pre-trained CNN model을 사용합니다 → 해당 논문에서 "imageNet"을 검색해보세요!)

- FCN이 등장하기 전에 semantic segmentation 모델들은 semantics한 정보와 location 정보들을 어떻게 잘 조합하여 이용할지에 대한 걱정이 있었습니다.
- FCN 이전 모델인 "그림 8"을 살펴보면 pooling 연산이 없기 때문에 conv filter가 전체 이미지에서 local 부분에 대한 feature만 뽑기 때문에 local information에 대한 정보만 획득하게 됩니다. 즉, semantic (or context) information을 알아내기는 힘들겠죠.
- 반대로 input size와 feature map size가 애초에 작으면 local information 에 대한 정보를 뽑을 수 없게 됩니다.
- 즉, pooling 연산을 적용하지 않는다는 가정하에 보면 semantic information과 local information의 trade-off(=inherent tension)가 발생하겠네요.
- 하지만 개인적으로 여기까지만 봐서는 왜 local information을 기반으로 "where"를 알 수 있는건지 잘 모르겠어서 "4.2 Combining what and where" 부분을 살펴 본 후 다시 설명해보도록 하겠습니다.
- CNN 구조를 이용하면 계층적인 정보(edge→texture→object) 들을 얻을 수 있는데 마치 이것이 feature map size가 작아지면서 encode하는 과정과 같아서 "deep feature hierarchies jointly encode location and semantics in a local-to-global pyramid(=featuer map)"이라고 설명한 듯 합니다.
- "skip" architecture를 이용하여 deep layer의 coarse=semantic information와 shallow layer의 fine=appearance 정보를 잘 혼합하여 segmentation에 사용할 수 있다고 설명하고 있습니다. 이 부분이 FCN 논문의 핵심인데 이 부분 역시 "3.Fully convolutional network"~"4.Segmentation Architecture" 파트에서 하도록 하겠습니다.

- 이후 논문을 전개할 방향성에 대해서 설명하고 있습니다.
- 마지막 부분에서 PASCAL VOC, NYUDv2, and SIFT Flow 데이터셋을 기반으로 성능을 측정했다는 것을 알 수 있습니다. (일반적으로 NYUDv2, SIFT Flow 데이터 셋은 다른 논문에서 보지 못한듯 하여 따로 설명하진 않겠습니다)
3. Fully convolutional networks
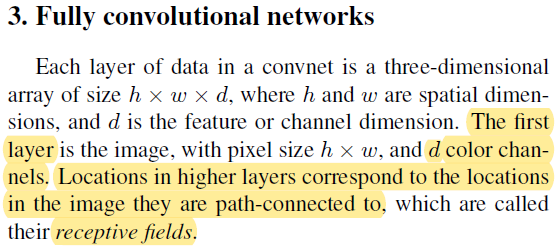
- CNN의 기본적인 구조에 대해서 설명하고 있습니다.
- 첫 번째 layer의 d는 color channel인데 보통 color image는 R,G,B 채널로 구성되어 있으니 d=3이 됩니다.
- 그리고 location과 receptive fields 부분에 대한 설명은 아래 그림을 표현하고 있습니다.
The receptive field in Convolutional Neural Networks (CNN) is the region of the input space that affects a particular unit of the network.


- 기본적인 CNN 구조에 대한 설명을 간략히 표현하고 있습니다.
- translation invariance 관련 개념은 아래 링크를 참고 해주세요!
(↓↓↓translation invariance 설명↓↓↓)
https://89douner.tistory.com/58?category=873854
4. CNN은 왜 이미지영역에서 두각을 나타나게 된건가요?
안녕하세요~ 이번 시간에는 DNN의 단점을 바탕으로 CNN이 왜 이미지 영역에서 더 좋은 성과를 보여주는지 말씀드릴거에요~ 1) Weight(가중치) parameter 감소 (가중치 parameter가 많으면 안되는 이유를 참
89douner.tistory.com

- 다음은 CNN에서 진행되는 연산들을 \(f_{ks}\)라는 함수 하나로 표현하고 있습니다.
- \(x_{ij}\)
- \(k\): kernel size
- \(s\): stride or subsampling factor
- \(f_{ks}\): layer type
- convolutional layer
- pooling layer (average or max)
- activation function(layer)
- \(y_{ij}\)
- 사실 위의 수식은 여러 연산종류(convolution, pooling, activation)를 한 번에 표현하려다 보니 위와같이 표현하려 한 것인데, 제 경우에는 사실 혼동을 줄 우려가 있을 수 있겠다고 생각했습니다.
- 그래서 제 나름대로 아래와 같이 해석하긴 했는데, 잘 못된 부분이 있으면 말씀해주세요!


- 앞서 언급했던 \(f_{ks}\) 함수는 위에 있는 합성함수꼴로 대체될 수 있다는 뜻인 듯 합니다 (아니라면 댓글달아주세요!). FC layer 없이 모든 layer가 convolutional layer로 구성(=Fully Convolutional network)되어 있기 때문에 위와 같이 모두 convolution 연산으로 이루어진 합성함수 꼴로 나타낼 수 있는게 아닌가 싶습니다.
- 아래 "그림 11"에서 윗 쪽에 있는 CNN을 deep net으로 표현한듯 합니다. 윗 쪽 그림의 deep net을 보면 FC layer를 통해 연산이 prediction 연산이 진행되는데 이 부분에서 non-linear function이라고 표현한 듯하고, FC layer를 convolutionalization을 한 아래 FCN 구조에서는 모두 convolutional filter로 구성되어 있기 때문에 deep filter or nonlinear (conv) filter라고 표현한 듯 합니다 (아마 non-linear라고 한 것을 보아 activation function까지 포함한 의미인듯 합니다). 그림을 자세히 보면 convolutionalization이 적용되기 전의 (전형적인) CNN의 4096이라고 표현된 부분은 FC layer로 인해 flatten된것처럼 표현되어 있는데, convolutionalization이 적용된 FCN의 4096 부분은 N×N의 feature map size에 4096개의 conv filter가 적용된 것 처럼 표현이된 것을 확인할 수 있습니다.
- 아래 "그림11"을 기준으로 보면 FCN 구조에서는 heatmap 형태로 출력(=output)합니다. 이러한 heatmap을 곧 spatial dimension이라고 할 수 있습니다. (FC layer를 사용하면 feature map의 spatial information이 다 사라지겠죠?)
- 이러한 spatial dimension을 가지고 resample을 할 수 있다고 설명하고 있는데 이 부분은 "3.3. Upsampling is backwards strided convolution"을 봐야 어떻게 resampling(or upsampling) 하는지 명확히 알 수 있을 듯 합니다. (검색해보니 resampling에는 보통 2가지 종류가 있는데, 그 중 하나가 upsampling하는거라고 하네요. 아마 FCN 구조의 decoder 부분을 말하려고 한게 아닌가 싶습니다)

- ※참고로 위의 그림(그림11)을 자세히 살펴보면 convolutionalization이 적용되기 전의 CNN 구조 입력 데이터는 전체 이미지의 일부 patch라는걸 알 수 있고 flatten되어 FC layer가 적용된 것을 볼 수 있습니다. 반면, convolutionalization이 적용된 CNN 구조는 전체 이미지를 입력으로 받고 flatten 없이 conv filter를 통해 feature map 형태를 그대로 유지하고 있는걸 확인할 수 있습니다. 이 부분이 갖는 장점을 뒷 부분에서 설명하도록 하겠습니다.

- FCN에서 사용한 loss function에 대해 설명하고 있습니다.
- "그림8" or "FCN이전에 고안된 두 번째 학습방법론" 부분에서 설명한 loss function과 같은 내용이니 해당 부분을 참고하시면 될 것 같습니다.
- Gradient descent 부분은 학습 시 사용되는 일반적인 개념을 말로 풀어쓴 내용이니 CNN 구조에서 backpropagation 부분을 함축적으로 설명하고 있구나 생각하시면 될 것 같습니다.

- 앞서 patch 방식의 학습방법론이 갖는 문제점을 통해 FCN 구조의 장점을 이야기하는 문장입니다.
- Conv filter가 receptive field에 많이 중첩(ex: stride=1인 경우)돼서 계산 될 때, 앞서 설명한 아래 그림7 처럼 path-by-path 방식으로 (독립적으로 by indivisual CNN) 계산하는 것보다, 그림9의 layer-by-layer 계산하는 것이 (계산량 측면에서) 더 효율적입니다.
- 지금까지의 내용은 어떻게 보면 FCN의 알고리즘을 설명했다기 보다는 기존 CNN에 대한 설명과 FCN이 나오기전의 모델들을 살펴보면서 FCN 모델의 우수성을 추상적으로 설명했습니다.
- 이 후부터는 이전 모델보다 왜 성능이 뛰어날 수 있었는지 FCN의 알고리즘을 구체적으로 살펴보면서 알아보도록 할 예정입니다.
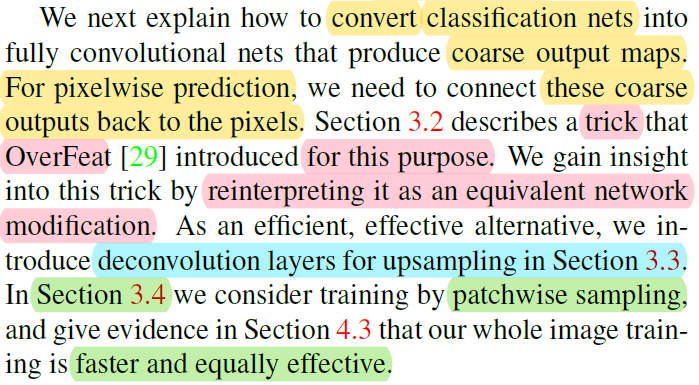
- 먼저, "section 3.1"에서는 "그림11"처럼 어떻게 classification nets을 fully convolutional nets으로 바꿀지 설명할 예정입니다.
- 앞서 "그림8" or "FCN이전에 고안된 두 번째 학습방법론" 부분에서 설명했듯이 loss function (for pixelwise prediction)을 계산하기 위해서는 원본 이미지 사이즈와 같은 prediction (map)과 정답 이미지가 있어야 합니다 (FCN이 중간과정(encoding+decoding)이 다를 뿐 결국 동일한 loss function 계산을 한다고 언급했습니다. ←"FCN에서 사용한 loss function에 대해 설명" 이 부분 참고). 이를 위해서 F×F heat map (="coarse output maps") 을 원본 이미지 사이즈만큼 키워줘야 하는데 이를 위해 "Section 3.3"에서 up-sampling이라는 기법을 설명합니다.
- "Section 3.2"에서는 OverFeat에서 사용한 trick (="shift-and-stitch")을 설명합니다. 여기서 언급하는 "reinterpreting it as an equivalent network modification"의 의미는 Section 3.2를 봐야 구체적으로 파악할 수 있을 듯 합니다. → 결과부터 말씀드리면 "shift-and-stitch" 방식을 FCN 모델에서 사용하지는 않았다고 합니다.
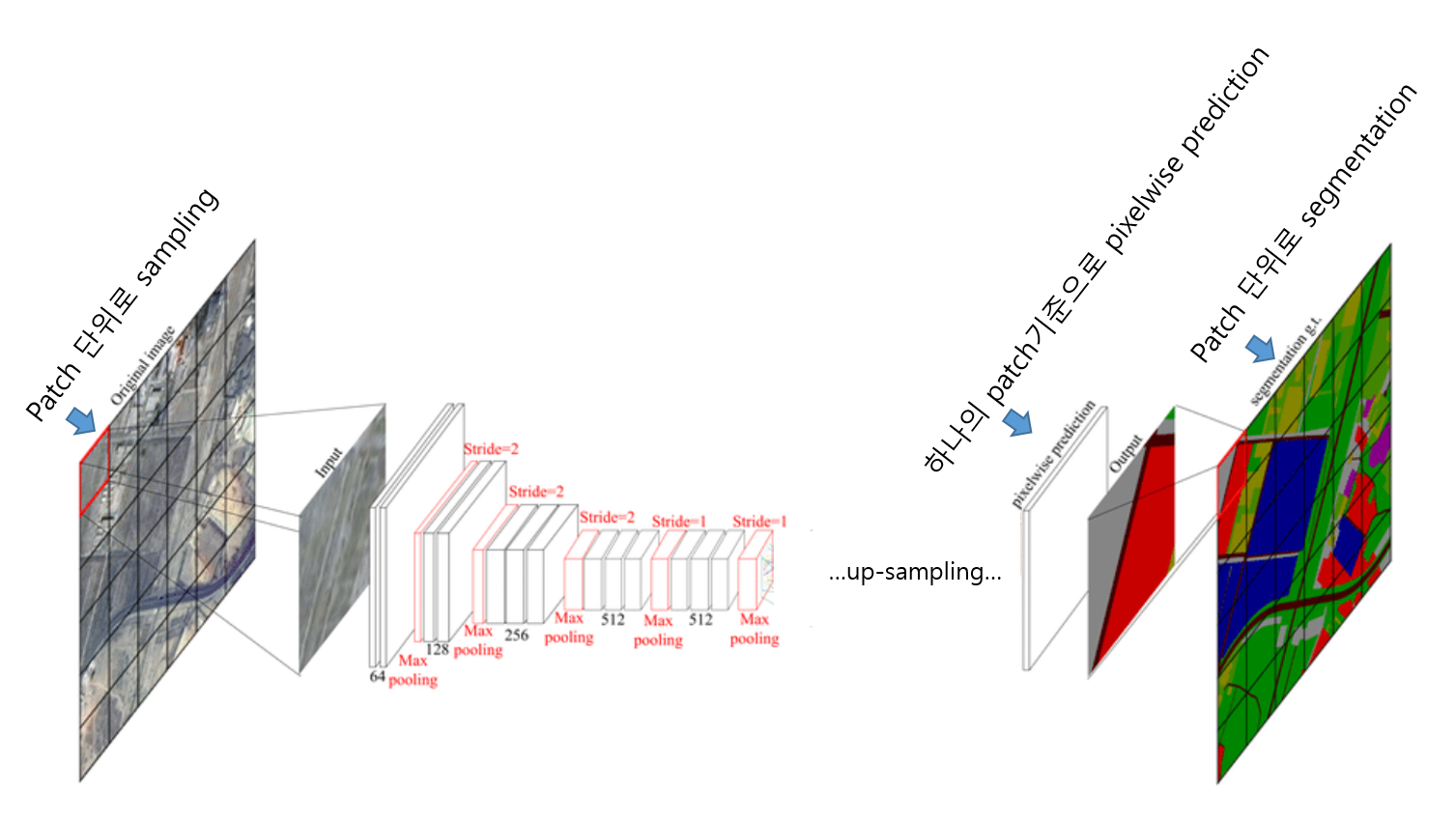
- "Section 3.4"에서 pathwise sampling에 의한 training을 했다고 하는데 이 부분도 해당 section을 통해 더 자세히 살펴보도록 하겠습니다. (대략적인 개념은 아래 "그림12"와 같습니다) → 결과부터 말씀드리면 patchwise sampling 방식으로 학습시키는 것보다 그냥 전체 이미지를 이용해 segmentation 학습을 시키는 것이 더 효과적이라고 합니다.
3.1 Adapting classifiers for dense prediction
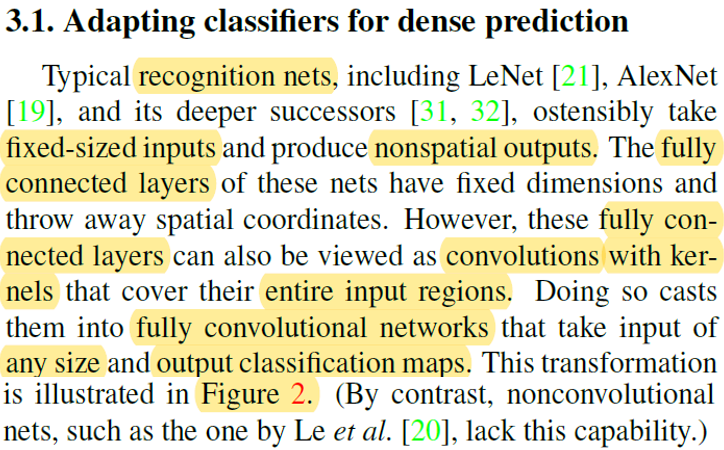
- 여기서 언급하는 recognition nets이라는건 CNN을 말합니다. 이 논문이 나올 당시 (global average pooling이나 fully convolutional layer와 같은 기법들이 적용되지 않았었기 때문에) input 이미지 크기가 제한된 상태로 CNN 학습이 가능했습니다. 그 이유는 FC layer에 도달하게 되면 직전 feature map이 flatten되어야 하는데, FC layer는 고정된 입력크기(=neuron)를 받아야 하는 구조이기 때문입니다.
- 예를 들어, 아래 "그림13"을 봤을 때 layer의 수와 conv filter에 적용되는 모든 hyper-parameter(=stride, padding 등)가 고정되어 있다는 가정하에, 입력 이미지의 크기가 매번 다르면 마지막 feautre map을 flatten 시켰을 때 최종 neuron 수들이 이미지 입력 크기에 비례해 다를 것 입니다.
- FC layer로 넘어가는 과정에서 feature map이 flatten되면 위치에 대한 정보가 손실된다고 간주하기 때문에 spatial coordinate을 잃어버린다고 표현합니다.

- 위 "그림13"에서 FC layer 부분을 convolution 으로 바꿔줄 수 도 있습니다.
- 예를 들어, 아래 "그림11"에서 윗 부분의 CNN을 기준으로 256개의 dimension(=channel)에 해당하는 feature map size가 F×F라고 가정해봅시다. F×F×256개의 neuron이 4096개의 neuron들과 Fully Connection이 되는데, 이때 spatial coordinate을 모두 잃어버립니다. 그런데 FC layer를 적용시키지 않으려면 어떻게 해야할까요?
- 우선, 아래 "그림11"에서 아래 부분(=convolutionalization 적용된 CNN)의 CNN을 기준으로 256 dimension(=channel)에 해당하는 feature map size가 T×T라고 가정해봅시다. 여기서 flatten 시키지 말고 다시 한 번 conv filter를 적용해 4096 dimension을 갖는 F×F feature map을 출력했다고 해봅시다. 이 후에 "1×1×4096" Conv filter 4096개를 적용시키고, "1×1×4096" Conv filter 1000개를 순차적으로 적용시켰다고 해보겠습니다. 그럼 최종적으로 "F×F×1000"의 output feature map이 출력 됩니다. 위에서 언급한 "cover their entire input regions" 이 부분은 1×1 conv filter가 (sliding window 방식으로) 적용되면서 결국 feature map을 모두 커버하므로 entire input regions를 커버하는 것이라고 표현한 듯 합니다. (아니라면 댓글달아주세요!)
- "take input of any size" 이 부분은 사실 upsampling을 봐야 명확히 이해되는건데, 미리 말씀드리자면 (구조적인 관점에서 봤을 때) 결국 아래 "그림14"처럼 output feature map size가 F×F이던지 M×M이던지 상관 없이 해당 output feature map (F×F×21 or M×M×21)을 기반으로 각 upsampling을 진행할 수 있기 때문에 segmentation을 위한 입력 이미지의 크기는 문제가 되지 않는다는 것을 의미합니다.


- 아래 "그림15"를 보면 resulting(=heat) map에 해당하는 특정 위치(pixel)가 input image의 특정 patch상의 CNN evaluation 결과라고 볼 수 있습니다.

- "the computation is highly amortized over the overlapping regions of those patches"라는 표현은 아래 그림과 같이 진행하는 방식보다 FCN으로 할때 더 계산효율성이 뛰어나다는 식으로 이해했습니다. FC layer를 이용한 AlexNet을 기반으로 segmentation하려면 아래와 같이 고정된 input size를 이용하는 patch(=224×224)를 이용해야하는데, convolutionalization된 FCN을 이용하면 input size에 영향을 받지 않으므로 굳이 patch 방식으로 training or inference 할 필요가 없습니다.
- 아래 그림(그림11)을 보면 convolutionalization이 적용되지 않고 FC layer를 사용하면 patch 단위로 입력이됩니다. 이렇게 되면 위의 그림7처럼 patch(=receptive field)에 속한 pixel(=해당 patch의 중간이 되는 pixel) 부분에 해당 class에 속한 색을 할당해주면서 segmentation을 진행해줍니다.
Q. 보통 FCN이 naive approach보다 5배 빠르다면, naive approach가 110ms 이상된다는 건데, AlexNet 기준으로 1.2ms가 걸린다는 가정하에 500×500 기준으로 patch 방식을 적용하면 100의 patch 별로 계산이 되어야 한다. 그런데, 그림7에서 설명한 방식을 기준으로 하면 100개보다 훨씬 많은 patch가 필요해서 naive approach가 정확히 뭔지 레퍼를 봐야 판단 할 수 있을 듯 하다... 아니면 patch 개수와 위치를 선별적으로 고르는건가.....(혹시 아시는 분이 있으면 댓글달아주세요!)

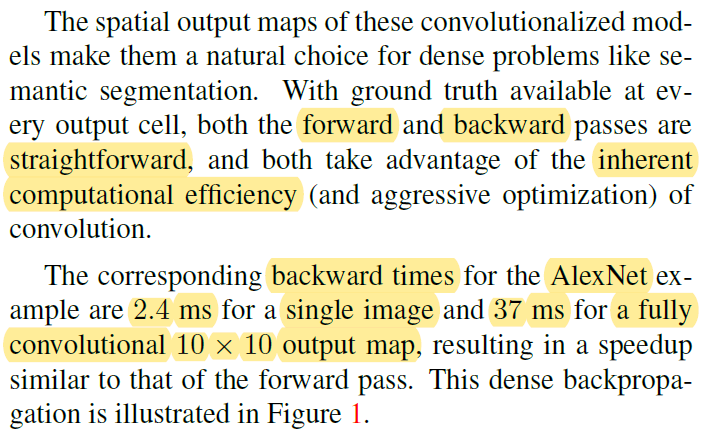
- 이 부분도 앞서 언급한대로 naive approach를 알아야 구체적으로 설명할 수 있습니다.
- 맥락만봤을 때는 backward 할때 전통적인 segmentation 방식(=여러 patch에 AlexNet(with FC layer)를 적용시킨 것) 보다 FCN 방식이 계산양과 시간적인 측면에서 훨씬 효율적이라는 이야기를 하고 있습니다.

- 전형적인 CNN 구조에서 output dimension(←이 논문에서 dimension을 검색해보니 spatial dimension으로 언급된 부분도 있어서 subsampling과 같이 사용된걸 보고 spatial dimension을 언급하고 있는거라고 생각했습니다)을 줄여주기 위해서는 pooling과 같은 연산을 통해 subsampling을 적용시켜줍니다. 그래야 다음 conv layer에 적용될 feature map size가 줄어들고, 이로 인해 filter size를 키워줄 필요없이 3×3 conv filter size(=small size)를 유지해줄 수 있게 됩니다. 물론, (더 많은 conv filter도 사용하면서) GPU가 견딜만한 연산량도 유지할 수 있죠.
- FCN에서는 이러한 output dimension을 줄여주기 위해 pooling대신 conv filter의 stride를 조절하여 subsampling 했다고 언급하고 있습니다.
3.2 Shift-and-stitch is filter rarefaction

- 앞선 "3.1. Adapting classifiers for dense prediction" 부분은 FCN 구조에서 encoder 부분을 설명한 것과 같습니다. 즉, 기존 CNN 방식에서 FC layer 부분을 convolutionalization 해주고 최종 output map (or heat map) = coarse output을 얻는 과정을 설명했습니다.
- 그럼 지금부터 아래 "그림17"처럼 coarse outputs으로 부터 어떻게 dense precition을 하는지 알아보도록 하겠습니다.
- ※사실 "3.2"에서 설명하고 있는 "shift-and-stitch" 방식이 FCN에 사용되지 않았습니다. 결과적으로 말하자면 이러한 "3.2"와 같은 기법을 이용해 dense prediction을 하려고 했지만 "4.2 section"에서 설명하는 skip architecture 방식이 더 효율적이여서 skip architecture 방식의 upsampling 기법을 사용했다고 합니다.
- 그래서 여기에서는 shift-and-stitch가 어떻게 동작하는지 알아보기만 하겠습니다.


- 우선 위에 있는 문장을 말로 설명하는 것보다 아래와 같이 그려서 설명하겠습니다.




- 위의 설명은 아래 그림 두 개로 대체하도록 하겠습니다.



- pooling or convolution 을 통해 feature map size를 downsampling 하는 행위 or 정도를 줄여주면 (ex: 행위=pooling or convolution layer 수를 적게 설정 or 정도=pooling or convolution layer의 stride를 작게 설정) trade off가 발생합니다. 다시 말해, downsampling 행위를 줄여주면서 얻는 장점과 단점이 있다는 뜻이죠.
- Downsampling이 적용되지 않을 수록 입력 이미지의 크기가 클 것이고 상대적으로 고정된 conv filter (ex: 3×3)가 커버하는 범위 (=receptive field)가 작을 것입니다. 이로인해 computation 시간도 더 오래 걸릴 것입니다. 반면에, downsampling이 적용이 되지 않을 수록 conv filter는 좀 더 finer한 정보를 얻게 됩니다.
(↓↓↓위의 설명이 이해가 안되시면 아래 글을 참고해주세요!↓↓↓)
https://89douner.tistory.com/57?category=873854
3. CNN(Convolution Neural Network)는 어떤 구조인가요?
안녕하세요~ 이번글에서는 Convolution Neural Network(CNN)의 기본구조에 대해서 알아보도록 할거에요. CNN은 기본적으로 Convolution layer-Pooling layer-FC layer 순서로 진행이 되기 때문에 이에 대해서 차..
89douner.tistory.com
- Shift-and-stitch trick을 적용시킬 때도 trade-off가 존재 합니다.
- "The receptive field sizes of the filters" (convolution or pooling size) 의 감소 없이도 coarse한 output map을 dense 하게 (for dense prediction) 만들어 줄 수 있지만, "The receptive field sizes of the filters"의 크기가 클 수록 finer scale한 객체 or information에 접근하는 것이 제한이 될 수 있습니다.
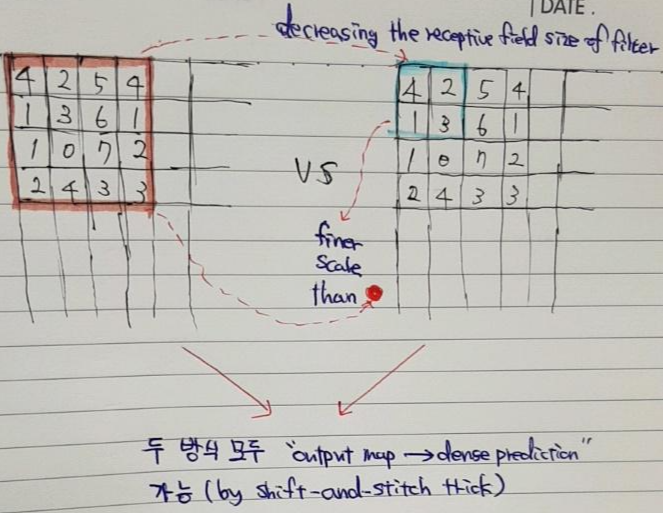

- 앞서 언급했듯이 이 논문에서는 shift-and-stitch trick 방식을 사용하진 않았다고 합니다.
- 이 논문에서는 upsampling을 위한 방법으로 skip layer fusion을 사용했다고 하는데 이 부분은 "3.3. Upsampling is backwards strided convolution"과 "4.2. Combining what and where" 부분에서 더 자세히 설명하도록 하겠습니다.
3.3 Upsampling is backwards strided convolution
- 앞서 언급한 shift-and-stitch 방법이 아닌, "Section 3.3"에서 설명하는 기법과 "Section 4.2"의 skip architecture를 결합시켜 upsampling을 진행했습니다.
- 그럼 지금부터 Section 3.3의 upsampling 방식에 대해서 설명하도록 하겠습니다.
- 앞서 언급한 shift-and-stitch 방식 외에 사용되는 upsampling 방식은 크게 두 가지가 있습니다.
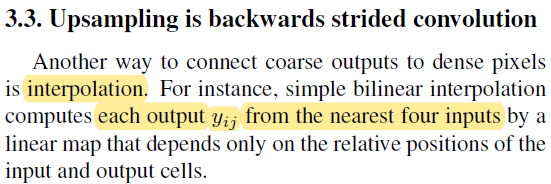
- Interpolation 기법
- Deconvolution 기법
1) Interpolation 기법
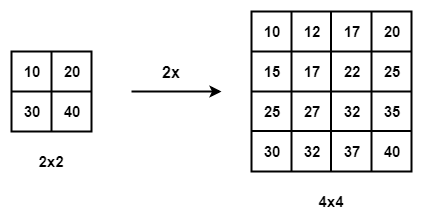
- Interpolation 종류 중 간단한 방식인 bilinear interpolation입니다.
- 예를 들어, 2×upsampling을 적용 할 시, 10과 30사이에 두 가지 pixel이 들어가게 됩니다. 이 때, 등차수열 개념을 도입해 적용합니다. 만약 10과 20사이에 완벽히 등차수열이 적용되지 않으면 약간의 미세한 조정을 두어 pixel값을 적용시킵니다.
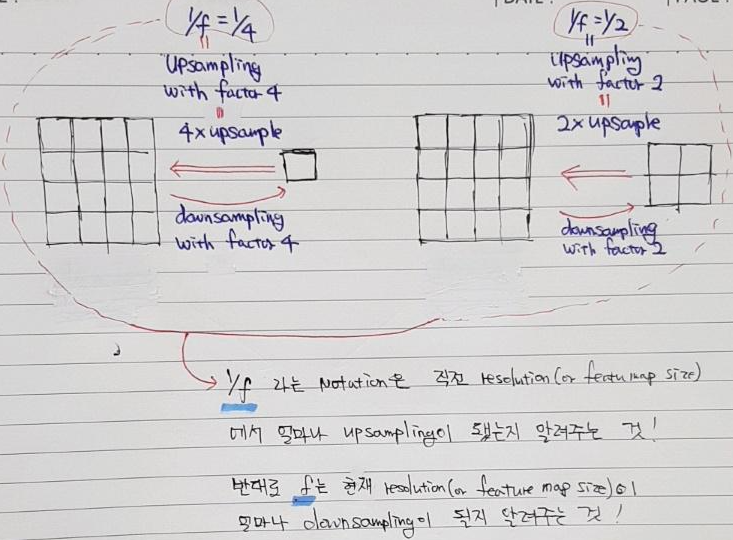
2) Deconvolution 기법
- Upsampling하는 방법은 convolution 연산을 이용해서도 할 수 있습니다. (←"a fractional input stride of \(\frac{1}{f}\), "output stride of \(f\)"와 같은 개념을 이용해 정확히 어떻게 연산이 되는지는 "4.2. Combining what and where" 파트에서 설명하고, 이곳에서는 결과적인 부분만 설명하도록 하겠습니다.)

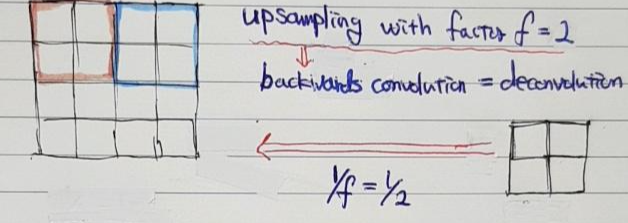
- 결과적인 측면에서보면 결국 upsampling이라는 것을 deconvolution을 통해 할 수 있습니다. 여기에서는 deconvolution과 backwards convolution이라는 용어를 동의어로 사용하고 있습니다.
- convolution이라는 것이 본래 신호처리에서 사용된 개념이라 continuous한 상황을 가정하면 integral 수식을 이용하게 되고, discrete한 상황을 가정하면 sigma 수식을 이용하게 됩니다.
- 위 논문에서 표현한 integral이라는 표현은 continuous한 개념에서 차용한 것 같고, 실제로 딥러닝 CNN 기반으로 연산이 진행되는 것을 보면 discrete convolution인 것을 알 수 있습니다.


- Discrete convolution도 미분 가능 (by chain-rule) 하기 때문에 학습이 가능합니다.
- 또한 cascade 방식이 아닌 기존 network (내부)에 upsampling과 관련된 deconvolution layer를 붙일 수 있기 때문에 (=in-network), end-to-end 방식으로 학습이 가능합니다.

- 앞서 언급했던 bilinear upsampling 같은 경우는 upsampling시 등차수열로 인해 미리 정의된 값이 할당 됩니다. 즉, 누구나 예측가능한 값(=fix)이 할당되는 것이죠. 하지만, deconvolution filter를 이용해 upsampling을 적용하면, upsampling 적용 시 학습된 deconvolution filter에 의해 우리가 예측하지 못한 값들이 할당됩니다.
- deconvolution layer 역시 activation function(=ex: ReLuU ← nonlinear function)이 적용되어 nonlinear upsampling을 배울 수 있다고 할 수 있습니다.

- in-network upsampling이라는 표현을 쓴 이유는 deconvolution network(=decoder or upsampling)을 기존 convolution network(=encoder)에 포함(or 결합)시켰시켰기 때문인 듯 합니다.
- Deconvolution으로 인해 기존 segmentation 방식보다 좀 더 효율적으로 dense prediction (for segmentation) 할 수 있다고 설명해놨네요.
- 사실 upsampling이 정확히 어떻게 되는지 여기에서 설명을 하고 있지 않습니다. 그렇기 때문에 추가적으로 deconvolution을 이용해 upsampling하는 방법을 기술하도록 하겠습니다.
[Upsampling by decovnolution]
- Convolution 연산이 어떻게 되는지 살펴본 후, 역으로 deconvolution이 어떻게 되는지 살펴보겠습니다.
※참고로 여기에서는 deconvolution이라고 설명하고 있는데 pytorch tutorial 구현 코드를 보면 upsampling 시 transposed convolution으로 되어 있습니다. 결국, transposed convolution 방식과 deconvolution을 유사하게 본것이라고 할 수 있겠는데. 엄격히 말하면, transposed convolution과 deconvolution은 같은 개념이 아닙니다. 이러한 부분을 DCGAN 논문에서 지적하고 있는데, 해당 부분은 DCGAN 논문에서 설명하도록 하겠습니다.
<Step1. Convolution 연산을 matrix 연산으로 변환>
먼저 convolution 연산이 진행되는 방식을 그림으로 표현하면 아래와 같습니다.

다음은 위의 convolution연산을 matrix연산으로 바꾸어주도록 합니다.
먼저, 입력차원을 (\(N×N\))에서 (\(N^{2}×1)\)로 변경해 줍니다.

Convolution 연산을 matrix 연산으로 바꿔줘야 하기 때문에 이에 맞게 convolution filter에 해당하는 부분도 convolution 연산 결과와 동일하게 나오도록 알맞는 matrix 형태로 변경해줘야 합니다.

위의 그림을 간략히 표현하면 아래와 같습니다.
<Step2. Deconvolution 연산>
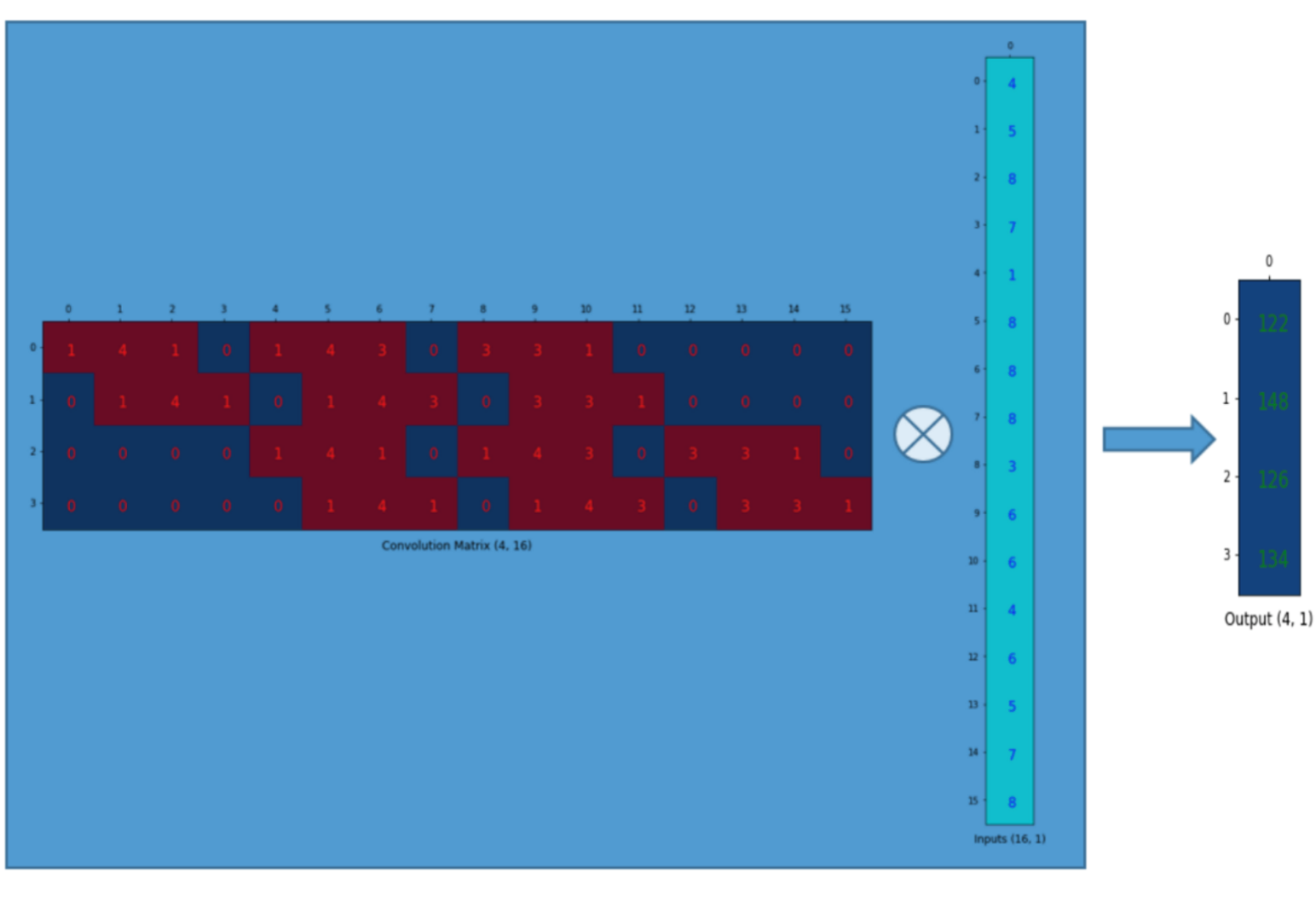
Convolution filter에 해당하는 matrix (=Convolution Matrix) 를 Transpose 한 Transpose (Convolution) Matrix를 만들어 줍니다.
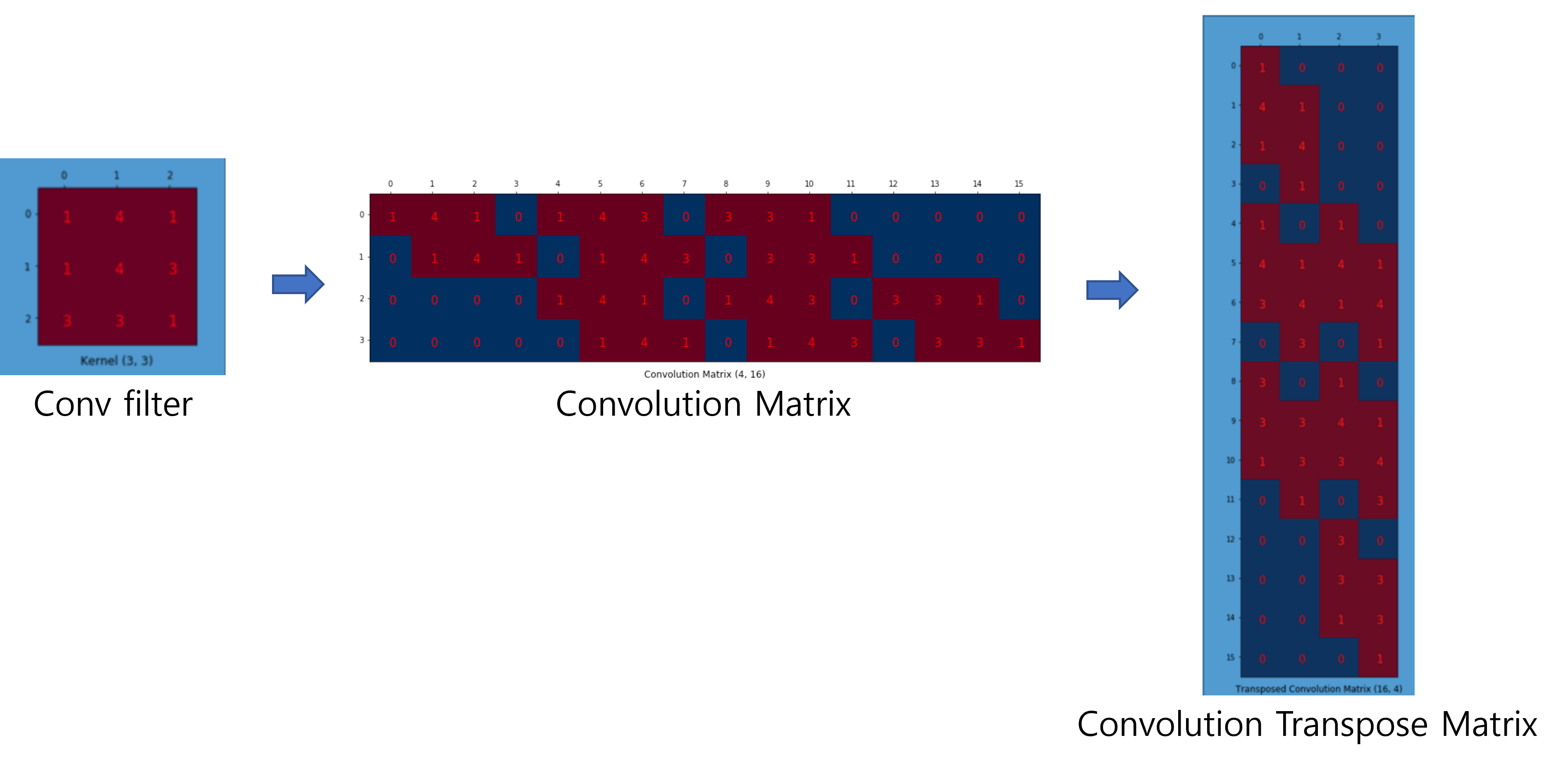
위에서 얻은 Convolution Trasnpose Matrix에 맞는 deconvolution filter를 matrix연산에 맞게 바꿔준 후 upsampling을 해줍니다. 이때, deconvolution filter는 "segmentation loss function (with backprogation)"에 따라 segmentation을 최대한 잘 해줄 수 있도록 학습됩니다.

앞서 설명한 convolution 연산과 deconvolution 연산의 matrix 수식을 아래와 같이 표현할 수 있을 것 같습니다.

결국 upsampling은 위와 같은 deconvolution 연산에 의해 이루어지고, 지금까지 설명한 대로 FCN을 도식화하면 아래와 같습니다.
※하지만, 아래 "그림25"가 최종적인 FCN 모델은 아닙니다. 아래"그림25"에서 skip architecture가 적용되어야 하는데, 이 부분은 "4.2. Combining what and where"에서 더 자세히 설명하도록 하겠습니다.

지금까지 설명한 deconvolution 설명은 아래(↓↓↓) 블로그를 참고했으니, 참고해주세요!
https://naokishibuya.medium.com/up-sampling-with-transposed-convolution-9ae4f2df52d0
Up-sampling with Transposed Convolution
If you’ve heard about the transposed convolution and got confused what it actually means, this article is written for you.
naokishibuya.medium.com
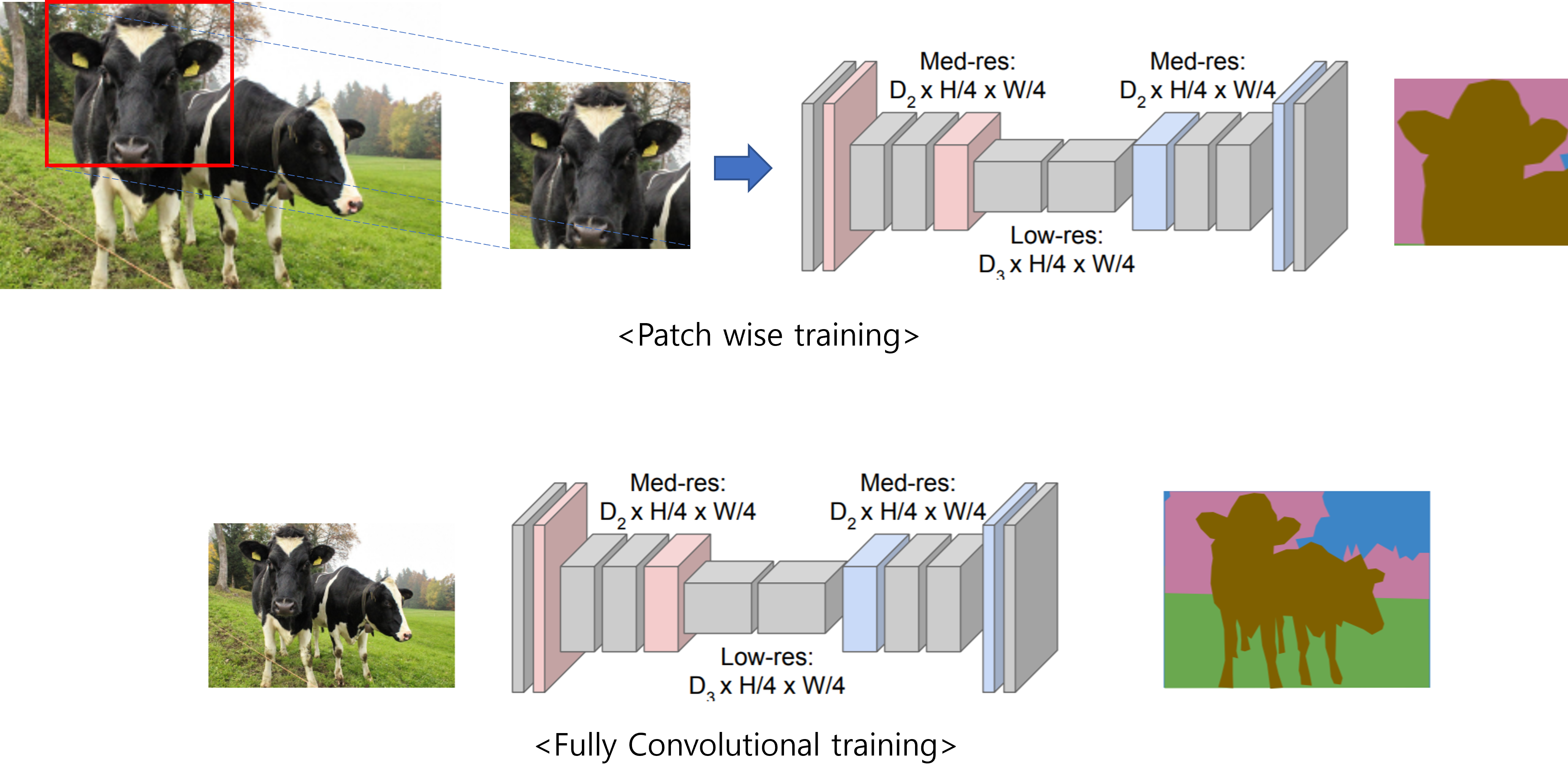
3.4. Patchwise training is loss sampling

- 여기에서는 distriibution이라는 말을 썻는데 그냥 data라고 해석해도 될 듯 합니다. 결국 data가 어떤 distribution을 형성 할 것이기 때문입니다.
- Patchwise 방식으로 학습 할 경우 patch들간에 overlap이 많이되면 불필요한 computation양이 많아질 것입니다. 반면에 아래 "그림19"처럼 전체 이미지를 입력받는 fully convolutional training 방식은 전체 이미지 크기가 큰 경우 GPU 메모리를 상당 부분 차지하기 때문에 충분한 minibatch size를 잡기 힘듭니다.
- "whole image ~" 이 부분은 그냥 pathwise 방식에서 patch가 전체 이미지가 되면 'whole image fully convolutional training'이 된다는 의미로 받아들였는데 확실하진 않습니다 (혹시 정확한 개념을 알고 있으시면 댓글달아주세요!)

- 이 부분은 DropConnect mask 부분을 이해하면 좋을 것 같은데, 다로 볼 시간이 없어서 위의 내용이 정확히 이해가 안되네요;;; (혹시 아시는 분은 댓글 부탁드립니다!)

- 이 부분은 patch 방식으로 학습시킬 경우 발생할 수 있는 현상에 대해서 기술 한 듯 합니다.
- 논문 앞 부분에서 "그림7"을 통해 설명한 것 처럼 한 이미지 내에서 두 patch의 중첩되는 영역이 많다면 당연히 fully convolutional computation으로 학습시키는 것이 더 빠를 것 입니다.
- mini-batch 단위로 학습시키면 다른 이미지들로 부터 얻은 다 수의 patch를 기반으로 multiple backward pass를 계산한뒤 각각의 patch에서 얻은 gradeint값을 축적한 후 weight update를 위해 사용하게 됩니다.


- Patch 방식의 training을 적용했을 때 더 빠르게 학습한다거나 loss가 잘 수렴한다던지의 장점은 없었다고 합니다. (앞서 patchwise sampling이라는 말이 있는데 위에서 언급하는 sampling은 patchwise sampling을 언급하는 듯 합니다)
- Fully convolution training 방식으로 전체 이미지를 입력으로 받아 traning 시키는 것이 효과적이고 효율적이라고 합니다.
4. Segmentation Architecture

- FCN 모델 구조를 보면 downsampling 부분은 기존 classification task에 사용되었던 CNN 구조와 동일함을 알 수 있습니다.
- 위와 같은 이유로 인해 ILSVRC 데이터 셋으로 학습된 CNN 모델들 (ex: AlexNet, VGG16, GooLeNet) 등을 FCN 모델의 downsampling을 위한 pre-trained model로 사용했습니다.
- 이 후, segmentation을 학습시킬 때 downsampling에 적용된 pre-trained 부분을 fine-tuning 시켰다고 합니다.
- Segmentation의 성능을 높이기 위해 "novel skip architecture"를 적용했다고 하는데, 이 부분은 "4.2. Combining what and where" 에서 더 자세히 설명드리겠습니다.


- 앞서 segmentation 학습을 위해 fine-tuning 시킨다고 언급했는데, PASCAL VOC 2011 데이터 셋으로 fine-tuning 시킨것으로 추측됩니다.
- Perforamnce measurement로는 "mean pixel intersenction over union"이 사용되었습니다. Performance measurement는 "5. Results" 부분에서 더 자세히 설명하도록 하겠습니다.
- Segmentation을 위한 loss function은 pixel 마다 multinominal logistic loss가 사용되었습니다.
(↓↓↓multinominal logistic loss와 cross entropy의 관계를 설명한 글입니다.↓↓↓)
https://89douner.tistory.com/21?category=868069
3. 학습을 하는 목적에 따라 cost function이 달라진다구(최대우도법, Cross Entropy)?
앞선 2장에서는 MSE(Mean Square Error)를 cost function으로 사용했습니다. 그런데, 모든 딥러닝에서 Cost function이 MSE로 통일되는건 아니에요. 그래서 이번장에서는 또 다른 cost function에 대해서 알아보..
89douner.tistory.com
4.1. From classifier to dense FCN

- 앞서 그림 11에서 기존 CNN을 어떻게 convolutionalization 해주는지에 대해 언급하고 있습니다.
- 이 부분은 앞에서 충분히 설명했으니 넘어가도록 하겠습니다. (대략적으로 설명하면 마지막 layer 부분 (=classifier layer)을 제거하고 1×1 conv filter를 적용시켰다는 이야기 입니다)
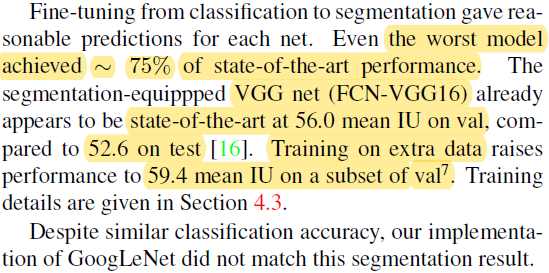
- 이 논문에서 실험한 segmentation 모델 (FCN with AlexNet, FCN with VGG, FCN with GoogLeNet) 중에 가장 성능이 나쁜 모델 조차도 당시 conventional segmentation 모델 중 SOTA에 해당하는 모델의 75% 정도 성능을 보여줬다고 합니다.
- 특히 FCN-VGG16 모델은 segmentation 결과 SOTA 성능을 기록했는데, 추가적인 training을 진행 했을 때, 그 성능이 더 올라갔다고 합니다.
- VGG-16과 GoogLeNet의 기존 classifciation 성능이 비슷함에도 불구하고, segmentation과 같이 사용했을 때는 FCN-GoogLeNet이 FCN-VGG 모델을 따라오지 못했다고 하네요.
4.2. Combining what and where
- 지금까지 설명한 FCN 구조를 다시 그림으로 표현하면 아래와 같습니다.
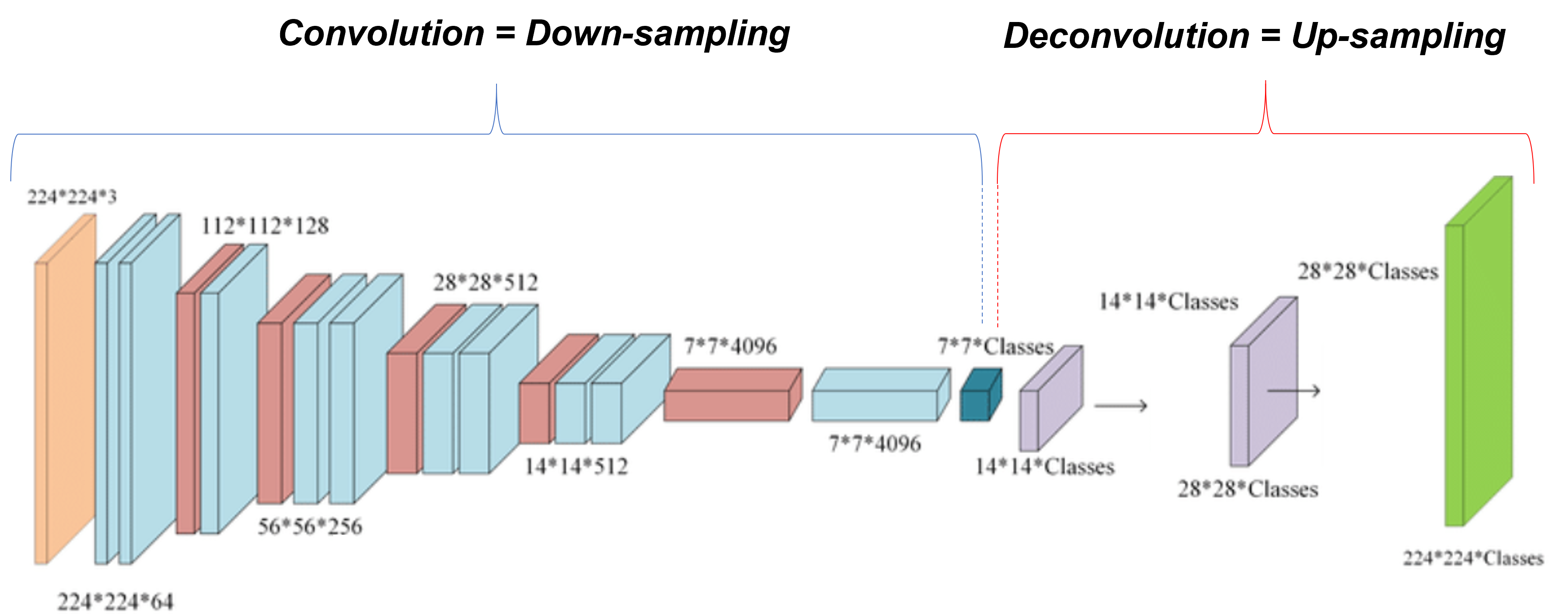
결론부터 말하자면 위에 있는 FCN 구조(without skip architecture)로는 segmentation 성능이 좋지 않기 때문에, "4.2. Combining what and where"에서 설명하는 skip architecture 기법을 적용하여 최종 FCN 모델 구조를 고안했다고 합니다. 그럼 지금부터 해당 논문 내용과 skip architecture에 대해 설명해보도록 하겠습니다.

- Combine과 refine의 의미를 정확히 이해하기 위해서는 지금부터 설명할 skip architecture 를 이해해야 합니다.
- Fine-tuning 관련한 부분은 4.1에서 언급했다고 하는데, 좀 더 구체적으로 어떻게 fine-tuning을 했는지는 "4.3. Experimental framework" 부분의 "fine-tuning" 부분을 보셔야 합니다. 그렇기 때문에 fine-tuning과 관련된 자세한 설명은 "4.3.Experimental framework"에서 자세히 설명하도록 하겠습니다.
- 우선 "Section 4.2"는 논문에 있는 순서 그대로 해석하기 보다는 먼저 skip architecture에 대해서 간단히 설명한 후 해당 논문들의 문단 순서를 변경해가며 해석을 해보도록 하겠습니다.
1) Skip architecture 관련 용어 및 notation
- 논문에서 제시한 FCN-32 결과는 224이미지를 받아 들인 것이 아닌 32×32 이미지를 입력이미지로 하고 1x1 heat map (입력이미지 224×224 기준으로는 heat map 크기가 7×7)을 본래 입력 이미지 크기인 32×32에 맞게 up-sampling한 결과를 보여주고 있습니다. 1x1 heat map을 원본이미지 크기에 맞게 up-sampling해주기 위해서는 32배 up-sampling해야 하기 때문에 FCN-32s 라는 이름을 붙였습니다.
- Ground truth와 비교하면 결과가 생각보다 좋지 못하다는 사실을 발견할 수 있습니다. Pooling 과정을 많이 거치다 보면 feature들의 정보가 손실되는데, 결국 마지막 heat map은 pooling layer를 제일 많이 거쳐서 나온 feature map이라고 할 수 있습니다. 즉, feature 정보가 많이 손실된 feature map으로 up-sampling을 진행하게 되면 당연히 제약사항이 많아지거나 제대로 up-sampling 할 수 없게 되고, 이에 따라 좋지 않은 결과를 얻게 됩니다. (특히 fine scale object들을 이미 정보가 손상이 되니 fine scale object들을 segmentation하긴 굉장히 어렵겠죠?)
- 그래서 이 논문에서는 1x1 외에 2x2, 4x4 와 같이 pooling 과정을 덜 거친 feature map들을 잘 이용하는 skip architecture 방식을 이용해 위와 같은 문제를 해결하고자 했습니다.

2) Skip architecture 방식 (위의 "그림26"을 같이 참조)
※ heat map = prediction된 결과 feature map
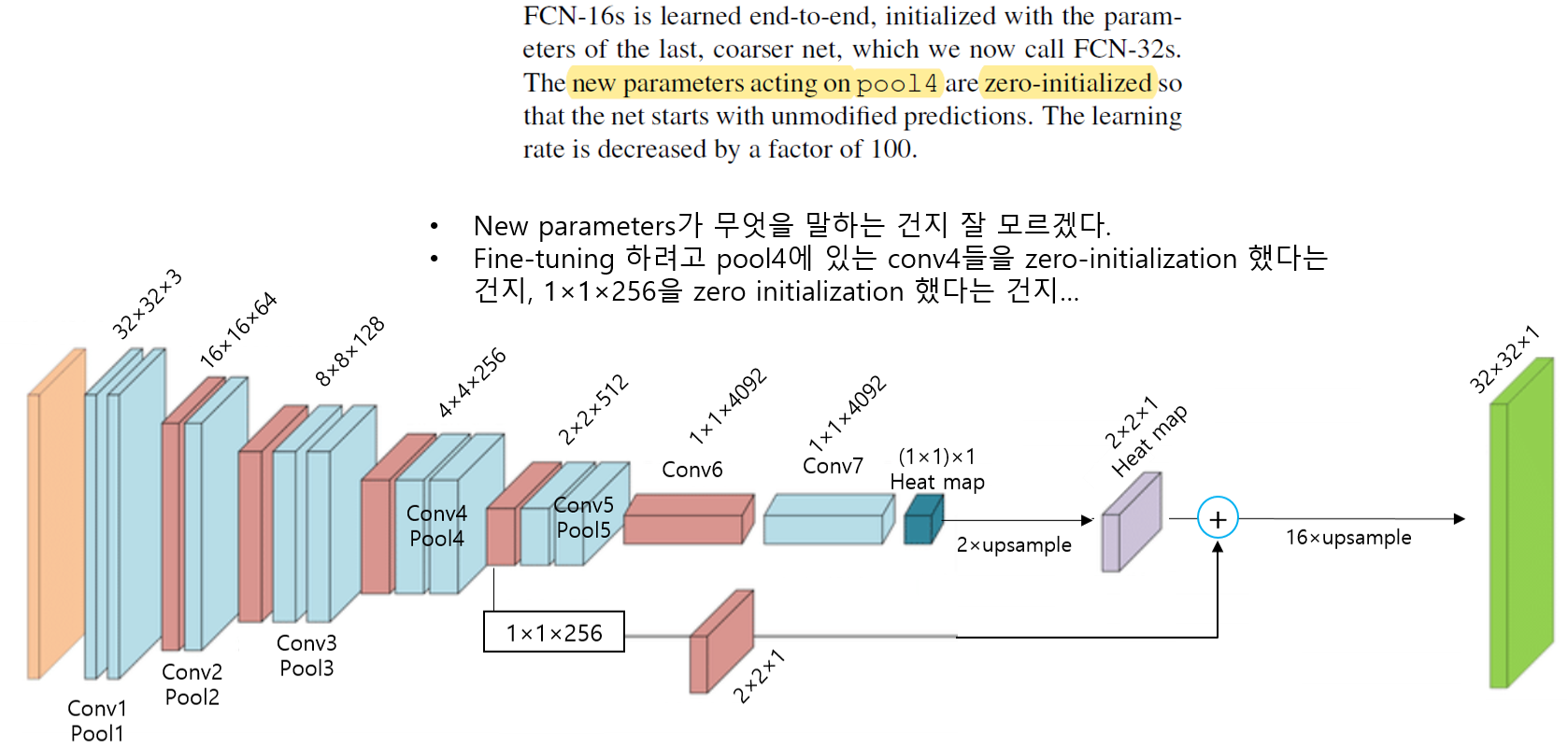
<1.FCN-16s> 그림26의 좌측 하단 그림을 기준으로 설명
- Pool5를 통해 생성된 1×1 heat map (prediction)을 2배 up-sampling 합니다. (→ 2×2 up-sampled heat map 생성됨)
- Pool4로 생성된 2×2×512 feature map에서 1×1×512 conv filter를 적용해 2×2 heat map (prediction)을 생성합니다. (→ 2×2 heat map 생성됨)
- “2×2 up-sampled heat map” + “2×2 heat map” 연산을 수행한 후 (element-wise operation), 16배로 up-sampling (by deconvolution) 해주어 “32×32 prediction” 결과를 보여줍니다.
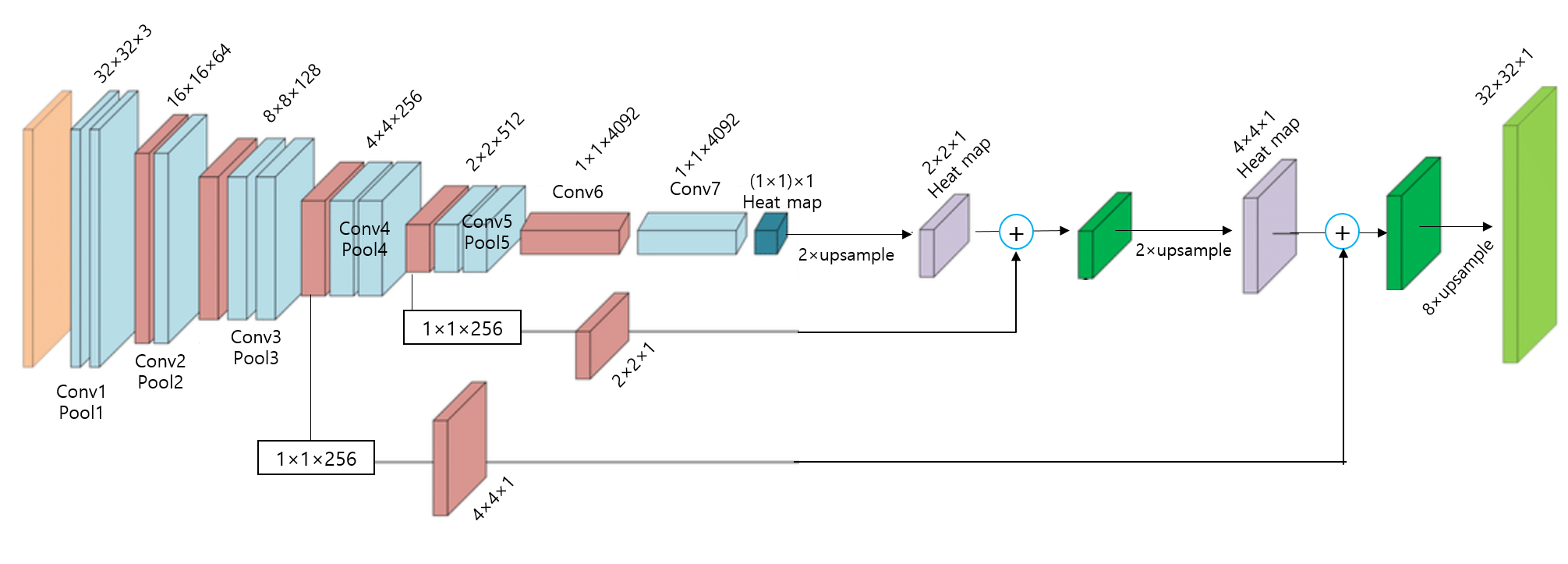
<2.FCN-8s>
- Pool5를 통해 생성된 1×1 heat map (prediction)을 2배 up-sampling 합니다. (→ 2×2 up-sampled heat map 생성됨)
- Pool4로 생성된 2×2×512 feature map에서 1×1×512 conv filter를 적용해 2×2 heat map (prediction)을 생성합니다. (→ 2×2 heat map 생성됨)
- “2×2 up-sampled heat map” + “2×2 heat map” 연산을 수행한 후 (element-wise operation), 2배로 up-sampling 해주어 “4×4 up-sampled heat map”을 생성 합니다.
- Pool3로 생성된 4×4×256 feature map에서 1×1×256 conv filter를 적용해 4×4 heat map (prediction)을 생성합니다. (→ 4×4 heat map 생성됨)
- “4×4 up-sampled heat map” + “4×4 heat map” 연산을 수행한 후 (element-wise operation), 8배로 up-sampling 해주어 “32×32 prediction” 결과를 보여줍니다.







- 앞서 언급한 skip architecture 방식을 "lower layer의 prediction map과 final prediction layer의 prediction map을 합산하여 연산하는 것"이라고 표현하며, 이렇게 합산하는 것을 통해 "combining 한다"고 표현합니다.
- Topology는 수학에서 사용되던 용어인데 여기에서는 graph 정도르 이해하면 좋을 것 같습니다.
- Skip architecture가 적용되지 않은 FCN구조는 line topology라고 표현할 수 있으며, skip architecture가 적용된 FCN구조는 DAG topology라고 표현할 수 있습니다. 이 논문에서 말하는 edge는 graph에서 말하는 edge를 말하는 것 같습니다 (edge들을 이으는 선을 vertex라고 합니다)


- Skip architecture를 적용시키지 않고 "32pixel stride at final prediction layer" 만을 이용하면 "the scale of detail" 부분이 문제가 되어 아래 그림처럼 (FC-32s) 결과가 좋지 못하다고 합니다.

4.2. Experimental framework

- Optimizer
- SGD
- Momentum: 0.9
- Minibatch size: 20 images
- Learning rate
- FCN-AlexNet: \(10^{-3}\)
- FCN-VGG16: \(10^{-4}\)
- FCN-GooLeNet: \(10^{-5}\)
- Weight decay
- \(5^{-4}\) or \(2^{-4}\)
- 위에서 언급하고 있는 "biases, these parameters" 들이 weight decay를 언급하고 있는것인지 잘 모르겠네요;;;;;; 맞다면 weight decay 정도에 따라 learning rate을 두 배 증가시켜 사용했다고 해석할 수 있을텐데.... (정확하게 아시는 분은 댓글달아주세요!)
- zero-initialization 부분은 아마 downsampling 부분에서 pre-trained 모델을 불러와서 사용할 시, fine-tuning을 위해 class score에 해당 부분을 초기화 시켜주기 위한 방법인듯 합니다 (아니라면 댓글 달아주세요!). 논문에서는 Random initialization 하는 것 보다 zero initialization을 하는게 더 좋다고 합니다.
- Drop out은 downsampling을 위해 사용된 pre-trained 모델에 구현되어있는 drop out을 segmentation 학습시킬 때에도 변경시키는 것 없이 그대로 사용했다고 합니다.
- 이 논문에서 3가지 방식으로 학습을 시켰습니다.
- Fine-tuning all layers: 제일 결과가 좋음
- Fine-tuning the output layers: "Fine-tuning all layers"결과의 70%정도 performance 밖에 내지 못함
- Scratch training: FCN의 downsampling 하는 부분이 보통 pre-trained CNN 모델을 사용합니다. 만약 segmentation을 scratch training 하려면 downsampling 부분(=pre-trained CNN)도 scratch training이 되어야 합니다. 그러므로 시간상 비효율적이라고 언급하고 있네요 (사실 시간적인 부분도 그렇고 pre-training 한 후, transfer learning을 통해 학습한 filter들이 scratch training을 통해 학습된 filter들 보다 더 다양할 것 같아 성능면에서도 transfer learning을 적용하는게 더 좋을 것 같다는게 제 개인적인 생각입니다).

- 앞서 patch sampling 방식이 더 좋지 않다고 설명해서 이 부분은 따로 언급하지 않도록 하겠습니다.

- 이 논문에서 사용된 training dataset의 labeling pixel들 대부분(3/4)은 background이기 때문에 다른 클래스들과 background 사이에 class imbalance 문제가 발생할 수 있습니다.
- 그래서 weighting or sampling loss 를 통해 class imbalance 문제를 해결하려고 했는데 크게 향상된 부분이 없어서 그런건지는 몰라도 class balancing이 불필요하다고 합니다. (weighting or sampling loss에 대한 별도의 수식은 없으나 불필요하다고 언급하고 있어 따로 찾아보진 않았습니다)

- 앞서 언급한 upsampling 방식에 대해서 설명하고 있습니다.
- Deconvolutional layer 부분에서 마지막 layer에 해당하는 부분은 bilinear interpolation 방식을 이용하는 filter 값들이 고정된 값으로 지정됩니다.
- 반면, deconvolutional layer 부분의 중간 layer들은 bilinear upsampling으로 초기화 되지만 학습이 가능하게 설정되었습니다.
- 그리고 앞서 "section 3.2"에서 설명한 또 다른 upsampling 방식들은 FCN에 사용되지 않았다고 언급하고 있습니다.

- 여기서 언급한 augmentation 방식은 3가지가 있습니다.
- Mirroring: Horizontal Flip
- Jittering과 translation이 각자 따로 적용됐다고 생각했는데, 문장을 보니 translation 하는 방식으로 jittering을 했다고 보여집니다. 정확히 어떻게 했는지는 잘 모르겠네요. 코드를 봐야 알 것 같습니다.
- 결론적으로 이러한 augmentation 방식이 눈에 띄게 향상을 불러오진 않았다고 합니다.

- 앞서 언급한 training dataset 외에 Hariharan 이 쓴 논문에서 사용된 8498 PASCAL training image 데이터셋을 더 활용했다고 합니다.
- 추가된 training dataset을 이용해 기존 FCN-VGG16의 validation 성능을 3.4% 향상시켰다고 하네요.

- 구현에 사용된 GPU장비 및 딥러닝 프레임워크를 소개하고 있습니다.
- Framework: Caffe
- GPU: NVIDIA Tesla K40c
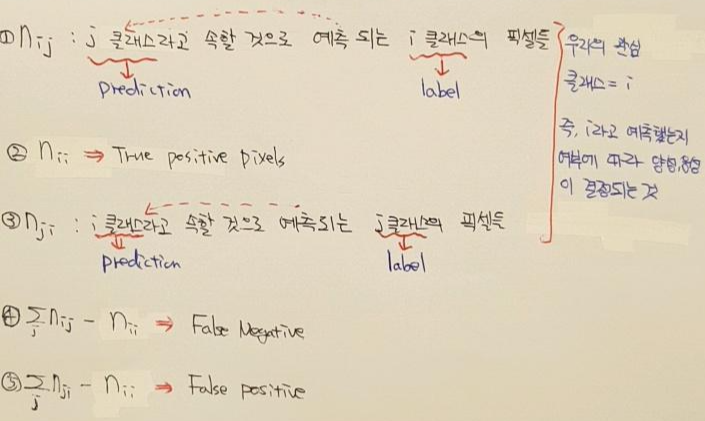
5. Results

- Result 부분은 따로 풀어서 설명하지 않고, performance measurement를 위해 사용되는 metrics를 설명하는 차원에서 마무리하도록 하겠습니다.
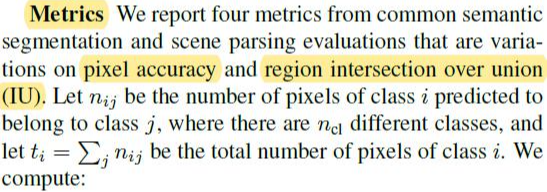
- Matrics를 설명하기 전에 내용들을 아래와 같이 간단히 정리해보도록 하겠습니다.







[Reference]
https://www.youtube.com/watch?v=nDPWywWRIRo
https://www.youtube.com/watch?v=JiC78rUF4iI
'Deep Learning for Computer Vision > Segmentation' 카테고리의 다른 글
| 3.UNet (4) | 2021.07.19 |
|---|---|
| 1. Segmentation이 뭔가요? (1) | 2020.02.17 |